2025-2026 (Push Back)
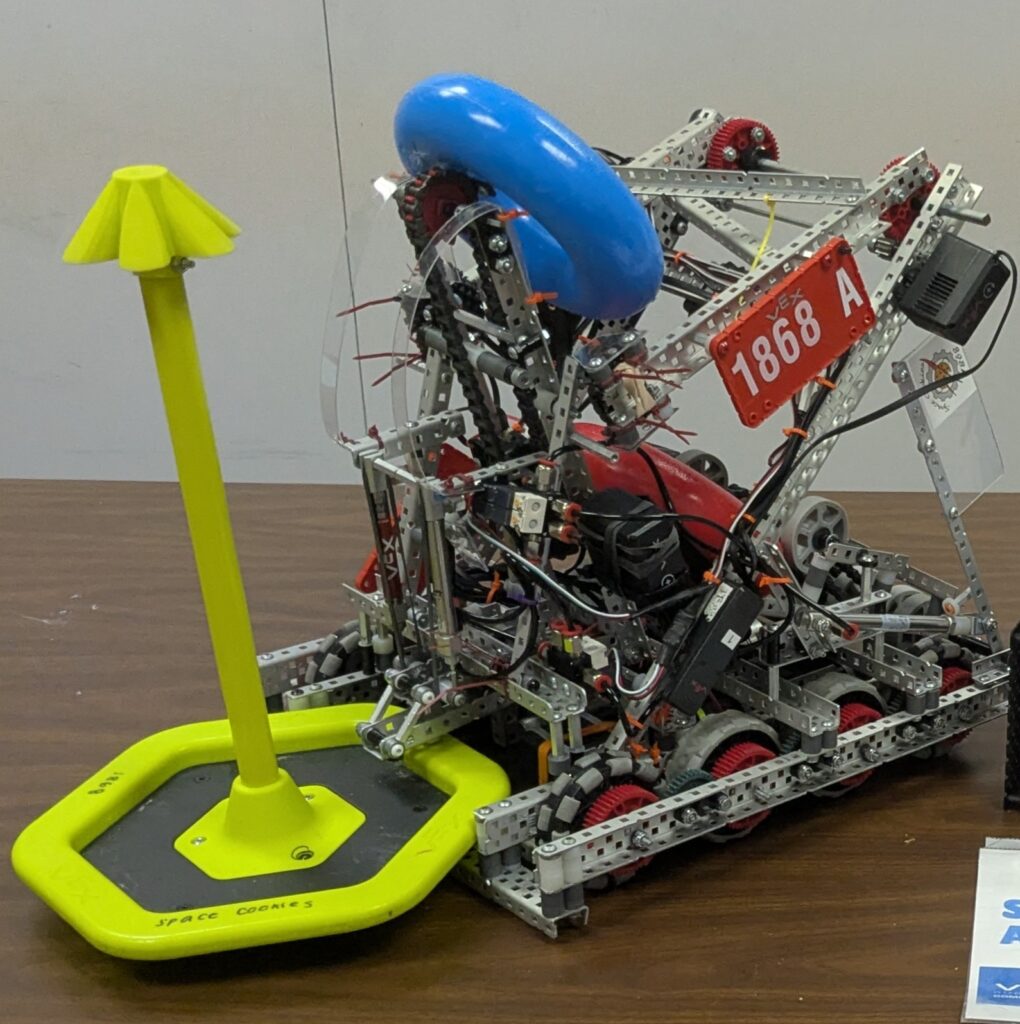
Team A: Gabriella
Gabriella, named after the Kasteye song, is a c-shaped robot that features a layered intake and outtake. With a 3/4 gear ratio and a 450 RPM, she is capable of both defense and offense. Gabriella is a strong independent girl boss, and we all loved working with her.
Team C: Sunshine
Sunshine is a 8 wheel, 4 motor drivetrain with a combined wattage of 71.5 watts in the robot. It has match loader powered by a single acting piston and a de-scorer powered in the same manner. It can reach all 3 goal levels and has a retractable aligner.
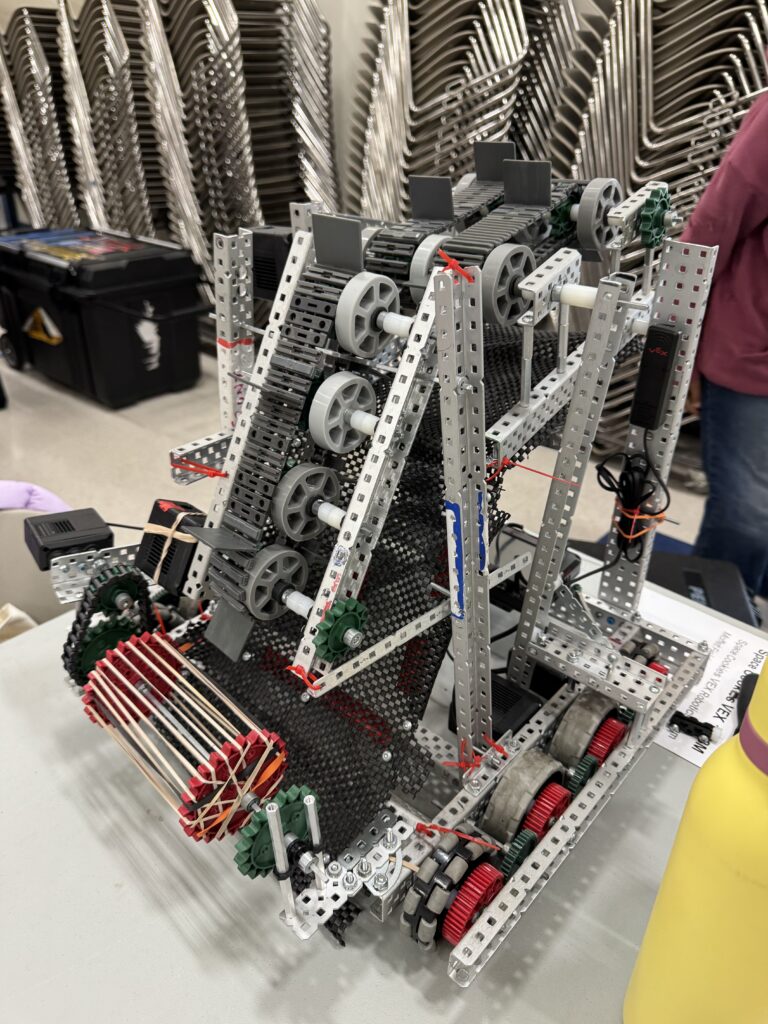
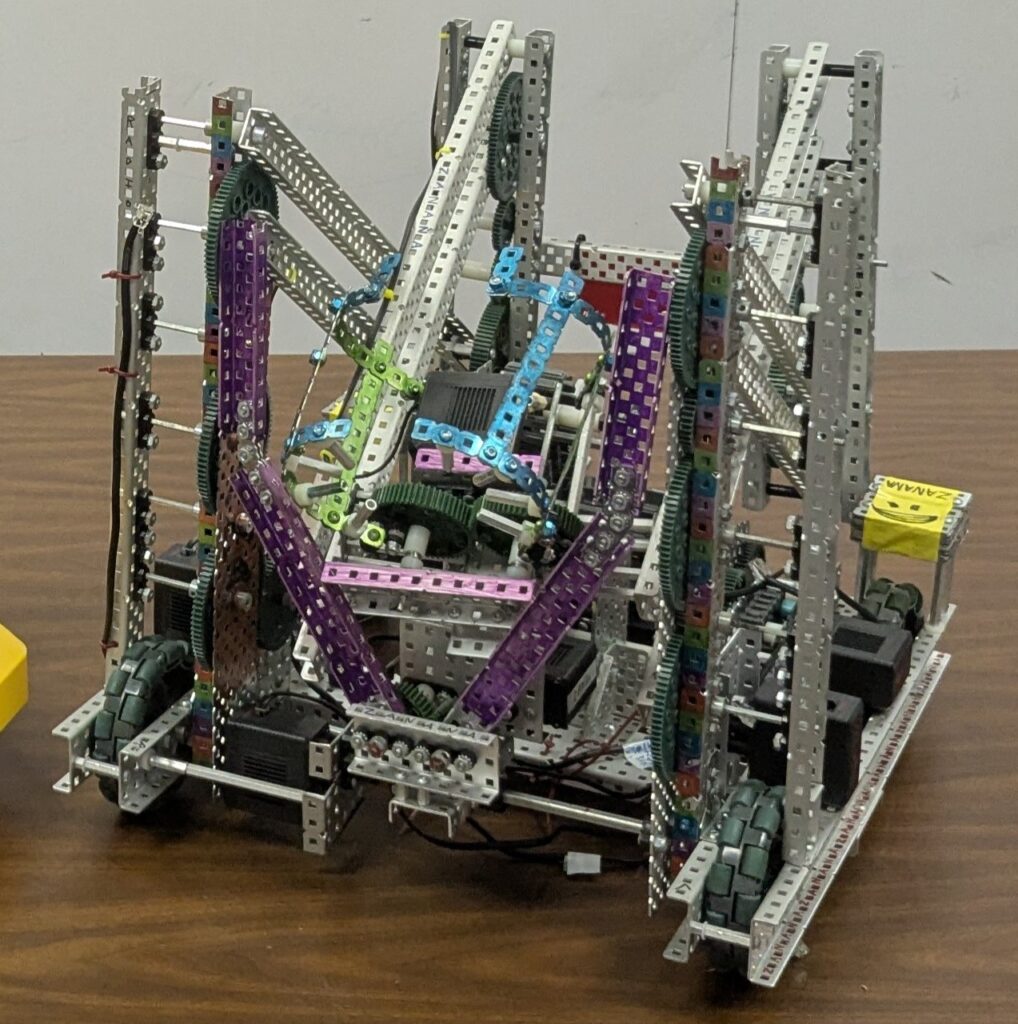
Team M: Momo Monkey
Momo Monkey features an 8 wheel, 4 motor drivetrain, with a 3:4 gear ratio. At the bottom, there is an intake made with sprockets and rubber bands. Moving up, there is a conveyor made of tank tread chain and flex wheels, parallel to a plexiglass ramp lined with mesh. Finally, an outtake similar to the conveyor to push the balls out. All parts of the robot are efficient and useful.
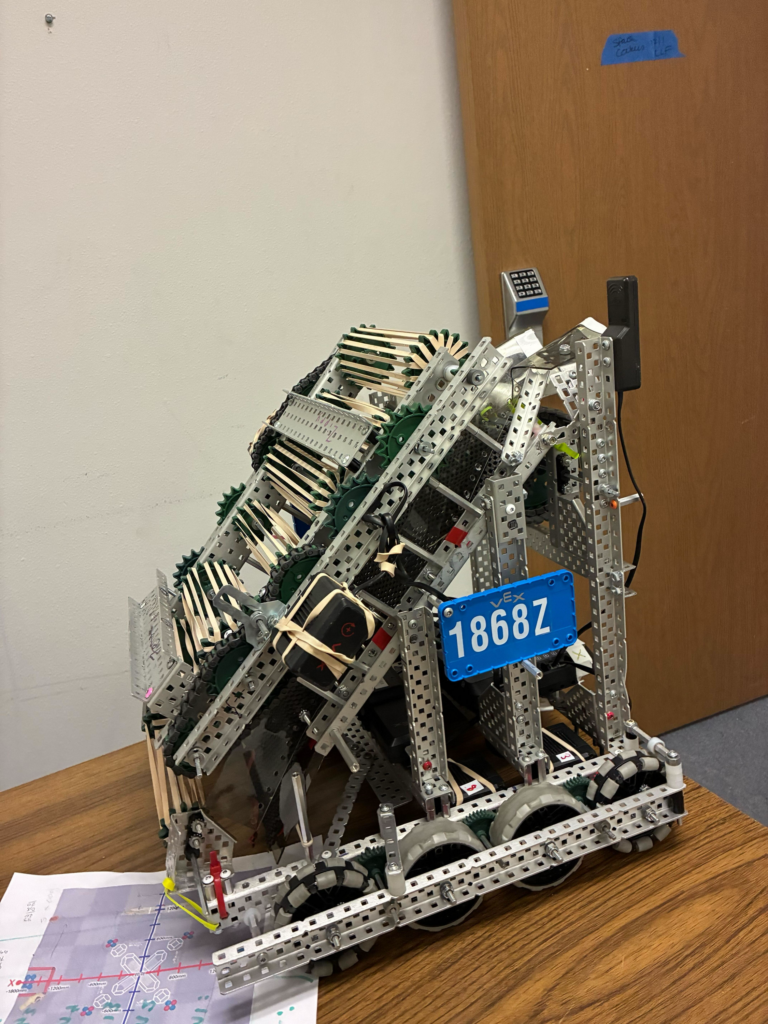
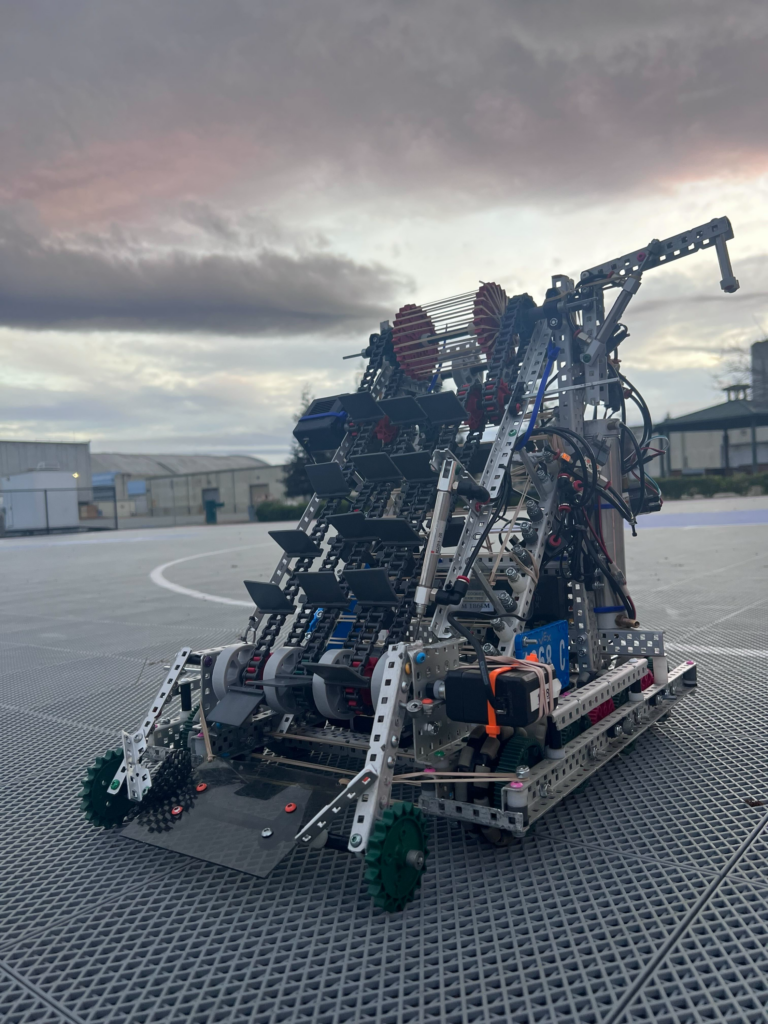
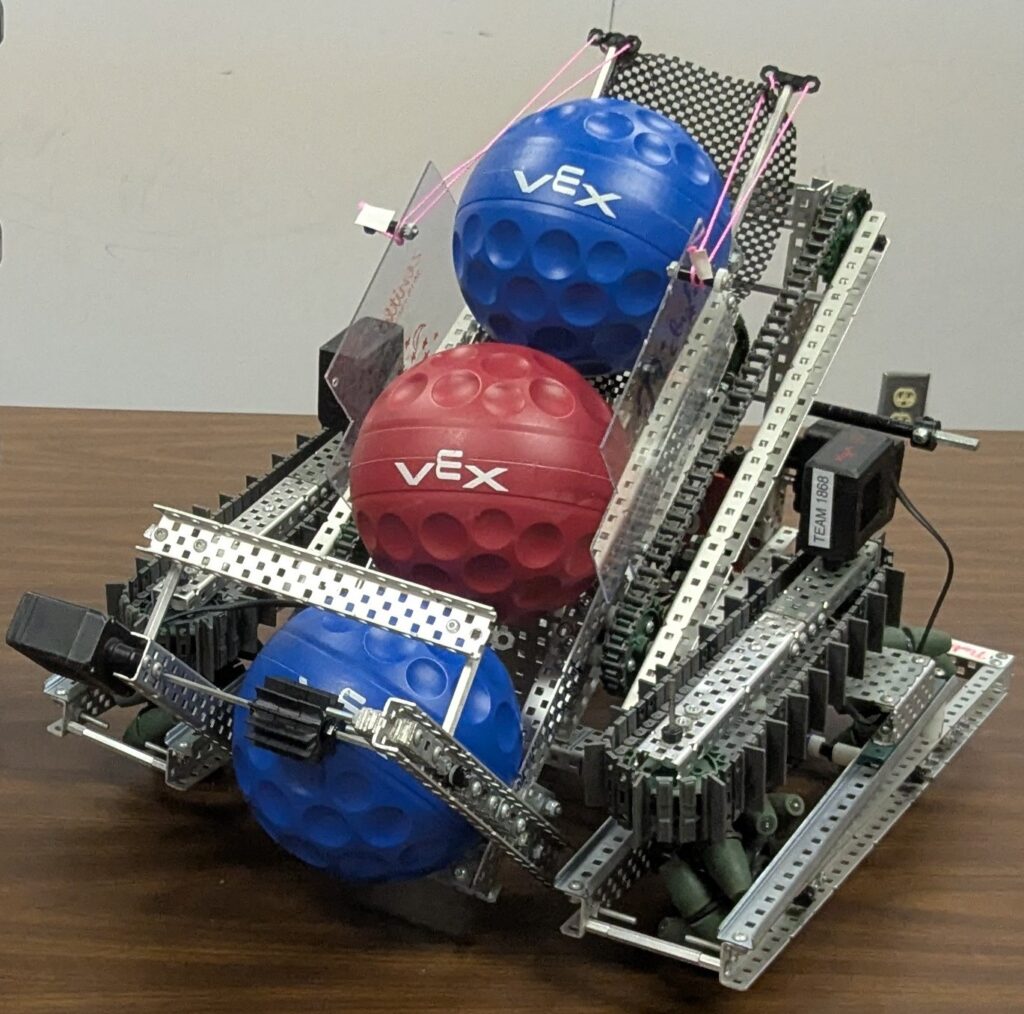
Team Z: Zippy
Zippy is an 8 wheel tank drive that has both omni and traction wheels paired with blue cartridge motors. There is a ramp made with sprockets, rubber bands, and plexiglass, followed by an outtake with a roof. We are most proud of the newly added feature called the anti tip wheel. When the robot tips over, the wheel brings it back.
2024-2025 (High Stakes)
Team A: Anonymous
[more about Team A’s robot]
Team C: [robot name]
[more about Team C’s robot]
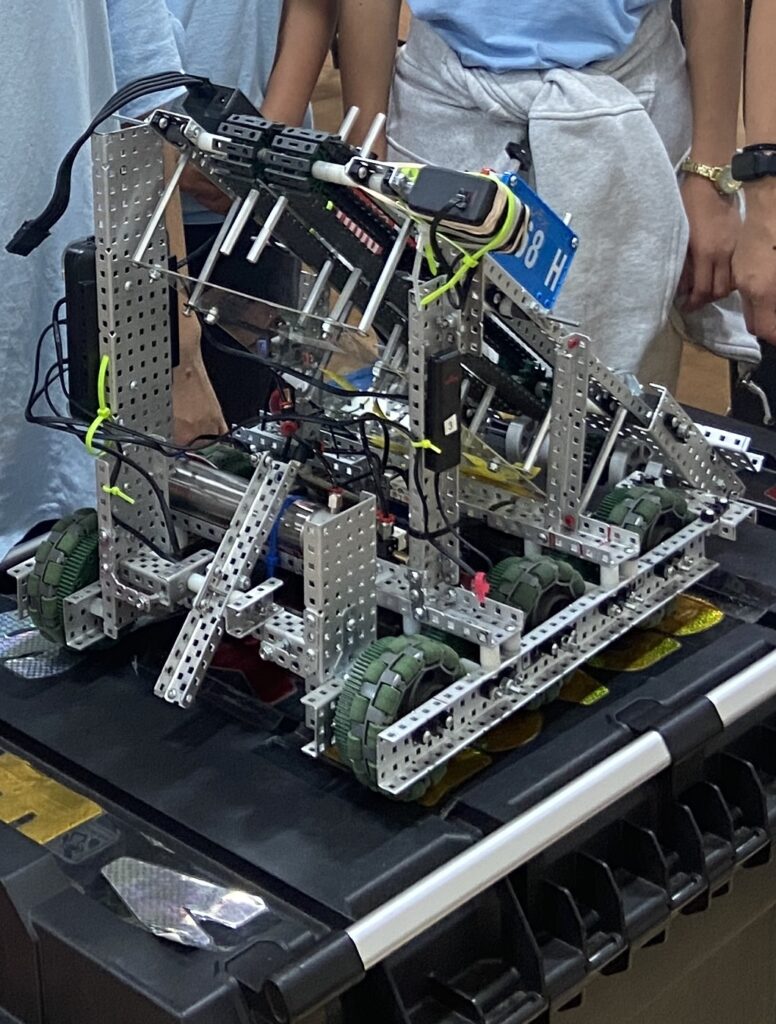
Team H: [robot name]
The robot has a clamp that clamps the mobile goal using pneumatics while the donut goes in the intake. The intake consists of four flex wheels. The conveyor is made of hooks and standoffs to so the donut can smoothly and efficiently go up the robot and be scored.
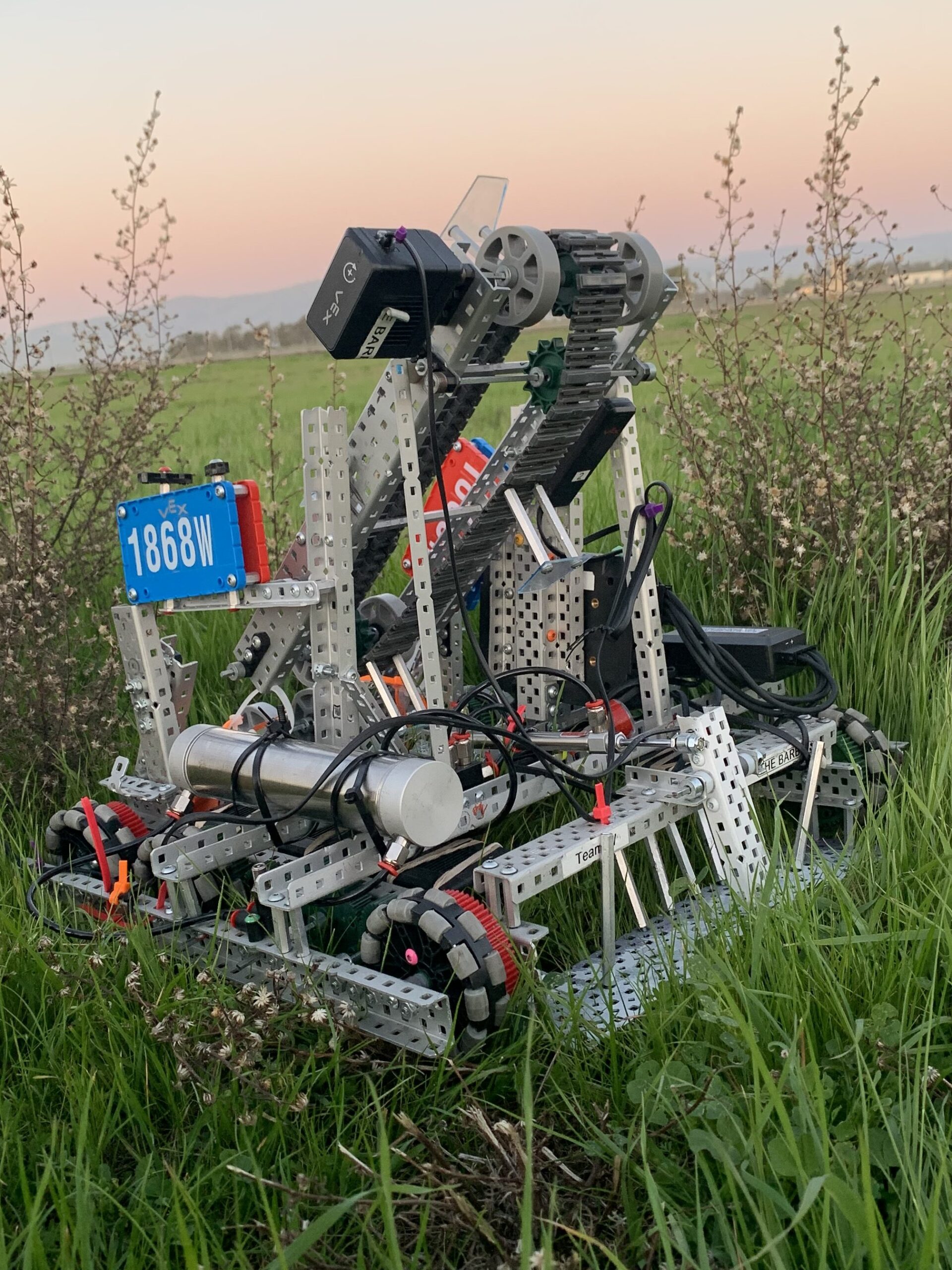
Team W: Robert
Robert consists of a flex wheel intake and a conveyor made out of tank tread with hooks fastened out of standoffs and plexiglass so the donut can work its way up the conveyor, finally sliding off onto the mobile goal.
2023-2024 (Over Under)
Team A: Cutie
[more about Team A’s robot]
Team N: [robot name]
[more about Team N’s robot]
Team X: [robot name]
[more about Team’s robot]
Team Z: [robot name]
[more about Team Z’s robot]
2022-2023 (Spin Up)

Team A: Aspirin
Aspirin, named after its ability to give us headaches, features a floating intake with a 2-motor 3200 RPM flywheel. Its three-wheel roller mechanism moves rollers with ease!

Team N: Nanana
Nanana (an homage to the previous season’s robot, Zanana) is a pretty interesting robot that has gone through several iterations. It has an intake mechanism that uses a plexiglass tray and a shooting mechanism that uses the momentum of the intake to shoot into low and high goals.

Team X: Xzoobeedoo
Xzoobeedoo features a conveyor intake and a one-wheel flywheel. It can shoot disks and turn rollers!

Team Z: Zania
Team Z: Zania can roll rollers, intake and launch disks, and has a passive string expansion. It does this with its floating intake and 4200 RPM flywheel!
2021-2022 (Tipping Point)
Team A: [robot name]
[more about Team A’s robot]
Team T: [robot name]
[more about Team T’s robot]
Team X: [robot name]
[more about Team X’s robot]
Team Z: Zanana
[more about Zanana]
2020-2021 (Change Up)
Team N: Nebula
[more about Nebula]
Team T: Theo
[more about Team T’s robot]
2019-2020 (Tower Takeover)

Team A: Alfred
[more about Alfred]

Team K: Kobb
[more about Kobb]

Team X: Xenon
[more about Xenon]

Team Z: Zenith
[more about Zenith]
2018-2019 (Turning Point)

Team A: Astrid
Astrid features a six wheel tank-drive, high-speed chassis with a rubber band & tank tread intake feeding a stripped gear puncher. Her puncher can shoot in about two seconds to toggle the flags, and her intake doubles as a cap-flipper. She has two autonomous modes: a 5 point platform & a 3 point shooting auton.
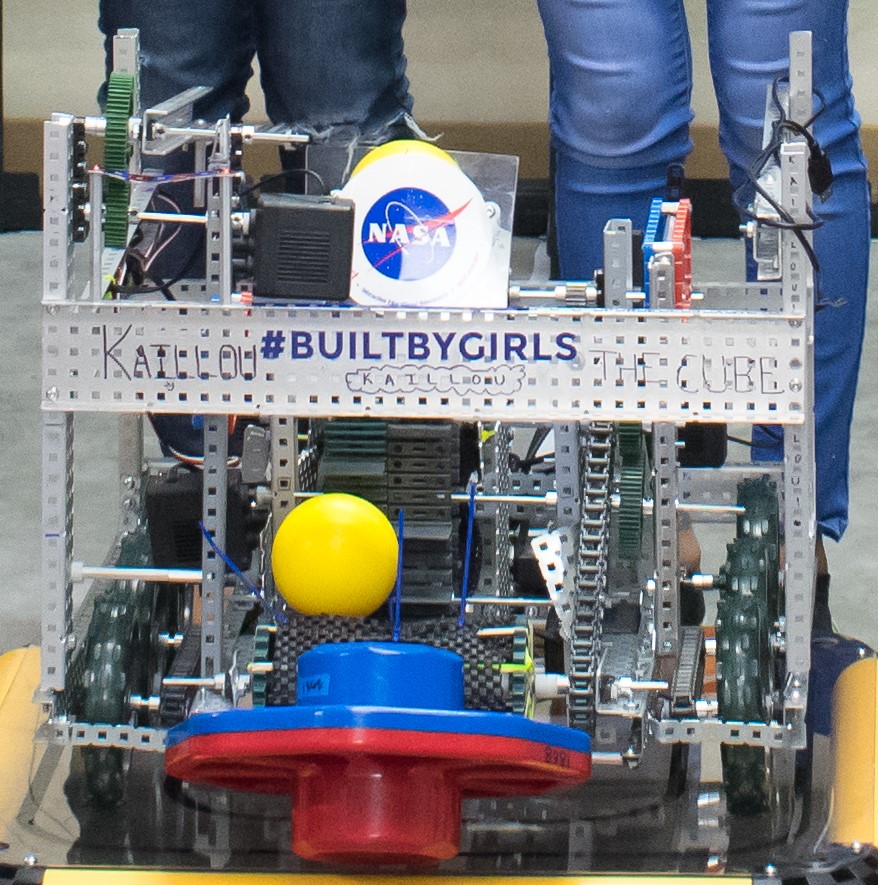
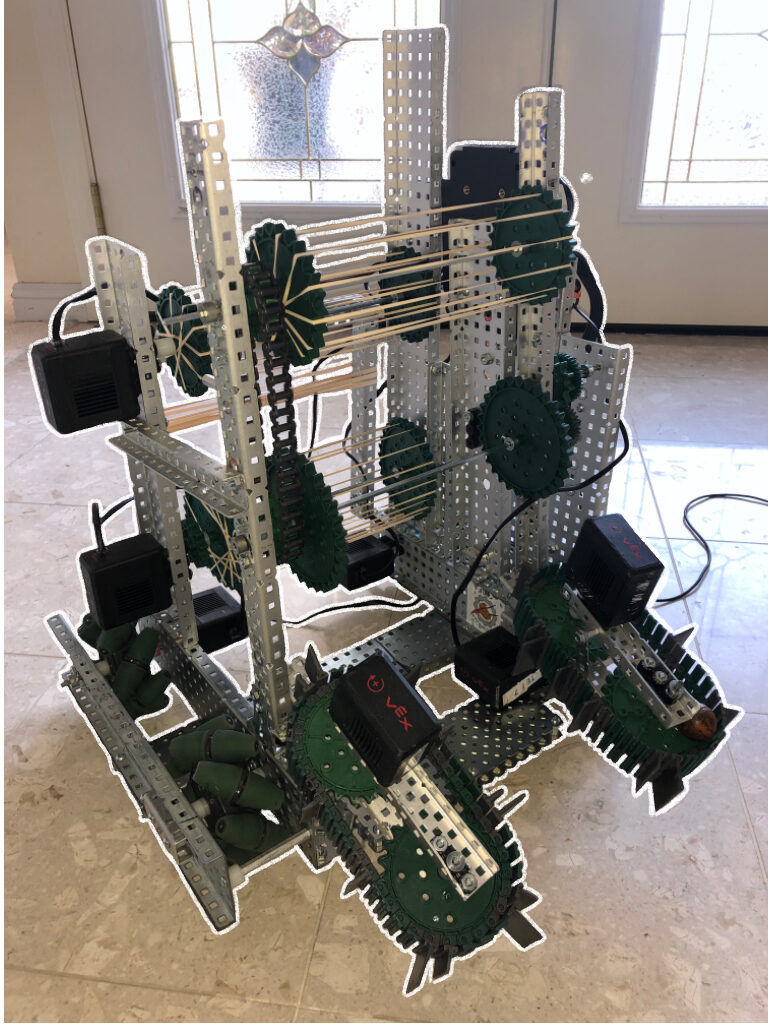
Team K: Kaillou
Kaillou Keke Kellogg’s Kardashian, better known as Kaillou the Kube or Kaillou, features Iggy the Intake, Chelsea the Chassis, Ben the bracing, Darla the Descorer, and Flynn the Flywheel. He weighs 17.4 lbs which help keeps him in place when he climbs on the platforms. Flynn is a high speed vertical flywheel who reaches all the flags; Darla is an arm who swings up to descore caps on posts while Iggy can flip caps on the field; Chelsea is a high-speed chassis who maneuvers quickly across the field; Ben helps hold everything together.

Team X: Xavier
Xavier is a cap flipping only robot featuring a clamping claw, double reverse four-bar, and a ground flipper. He can flip to de-score on the field, and put caps onto the poles. His reach allows him to score on all the low posts, and de-score other team’s high-scored caps.

Team Z: Zoi
Zoi features a six-bar lift, Spinning claw, high-traction 2 motor chassis, and ball intake with puncher. Zoi has high and low pole scoring, an Omni-Traction-Omni wheel configuration to better get onto platforms which was very successful, standoffs on back for low flag scoring, a spinning claw for cap-flipping purposes, an H-shaped chassis for accomodation. He has several different autonomous mode options to work with any match partners. Later in the season, Zoi gained a intake and puncher on their back, making Zoi a dual-action robot scoring machine.
2017-2018 (In the Zone)
Team A: Aries
[more about Aries]

Team K: Body
[more about Body]

Team X: [robot name]
[more about Team X’s robot]

Team Z: Ziv
[more about Ziv]
2016-2017 (Starstruck)

Team A: Andromeda
[more about Andromeda]

Team K: K-9
[more about K-9]
Team X: [robot name]
[more about Team X’s robot]

Team Z: Dr. Zuesette
[more about Dr. Zuesette]
2015-2016 (Nothing But Net)

Team A: Artemis
[more about Artemis]

Team K: [robot name]
[more about Team K’s robot]
Team X: [robot name]
[more about Team X’s robot]

Team Z: Zephyr
[more about Zephyr]
2014-2015 (Skyrise)

Team A: Festus
Our robot, Festus, has a multi-stage elevator lift and a rotating 3-hook claw that can score on the small posts. We have no skyrise capability. Our autonomous scores two floor goal points, moving away from the preload and pushing another onto our square. Our strategy is based on floor goals.

Team D: Drakon and Andromeda
Our robot, Drakon, has a four bar lift with a hook attachment that can lift cubes. We aim stack cubes on the small and medium posts. Our current autonomous program drops the preload onto the floor goal by moving back and dropping the hook.
For the first Annual All Girls Showcase, the troop had originally planned to just take three robots to go, since there were a limited number of girls from some teams who could attend. Then we were asked to bring another robot to increase the attendance of the invitational! Thus, Andromeda was created out of the ashes –well, chassis anyway– of Drakon to compete in Thousand Oaks. The Wild Child robot features a six-bar lift with a rotating hook/clamp arm on the end to grab cubes and skyrise pieces, reaching the small and medium polls and stacking 2-3 skyrise pieces.

Team J: Juniper
Our robot has an elevator lift as the other two robots do. We can stack at least 2 skyrise pieces. Our autonomous scores one floor goal but we aimed to create an autonomous the scores a cube on a skyrise.

Team Z: Zirconium
Our robot, Zirconium, currently has a mecanum wheel chassis with an elevator lift and claw attachment. Our elevator lift can reach the medium post and the rack gears can bring the claw to the top. We have multiple possible autonomous (a one point, two point, and three point one). Thanks the the claw, we can grab both cubes and skyrise pieces, helping us stack skyrise and put cubes on polls and skyrise towers.
2013-2014 (Toss Up)
Team A: Platypus
[more about Platypus]

Team K: [robot name]
[more about Team K’s robot]

Team X: Cygnus
[more about Team X’s robot]
2012-2013 (Sack Attack)
Team A: Watermelon/Draco
[more about Watermelon/Draco]

Team X: [robot name]
[more about Team X’s robot]